 dscp46, aka isithran
dscp46, aka isithran
dscp46, aka isithran
dscp46, aka isithran
If this is not the first time you're not running a calibration, make sure to remove former calibration data, and rebstart your computer. Failure to do so will give wrong results.
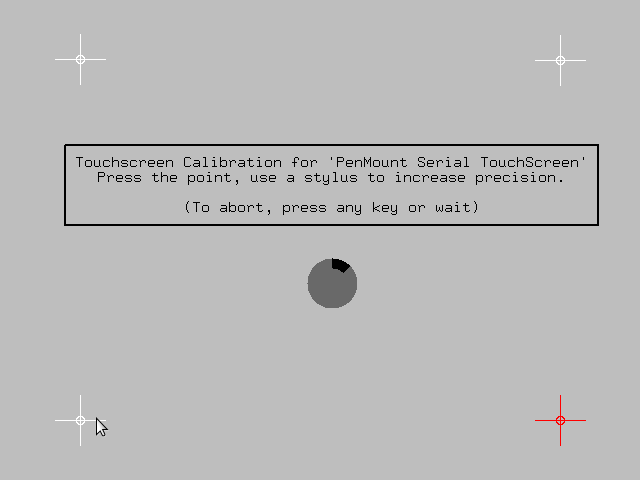
First, to get the calibration data, run xinput_calibrator -v in a terminal, and let yourself be guided by the instructions.
Then, get your screen resolution. You can find it by running xrandr | grep '[^0-9]+' in a terminal.
One the calibration is completed, search the 4 following lines in the terminal.
DEBUG: Adding click 0 (X=174, Y=128) DEBUG: Adding click 1 (X=1129, Y=137) DEBUG: Adding click 2 (X=177, Y=893) DEBUG: Adding click 3 (X=1121, Y=898)
Copy the corresponding values below:
As specified by the Wayland Documentation[1], libinput can rely on a device-specific coordinate transformation matrix \(A_d\) that needs to be associated through udev.
The coordinates of four points \(\{x_0,y_0\} ... \{x_3,y_3\}\) situated near each corner of the screen are needed to get actual coordinates. To facilitate the calibration, xinput_calibrator puts those points away from the border with a margin of \(\frac{1}{8}\) of the screen size, to avoid issues with dead corners.
The last required values are the screen width \(S_w\) and the screen height \(S_h\). To get our parameters, we thus need to solve the following:
$$ A_d = \begin{bmatrix} \frac{1}{8} & \frac{7}{8} & \frac{1}{8} & \frac{7}{8} \\ \frac{1}{8} & \frac{1}{8} & \frac{7}{8} & \frac{7}{8} \\ 1 & 1 & 1 & 1 \end{bmatrix} \cdot \begin{bmatrix} \frac{x_0}{S_w} & \frac{x_1}{S_w} & \frac{x_2}{S_w} & \frac{x_3}{S_w} \\ \frac{y_0}{S_h} & \frac{y_1}{S_h} & \frac{y_2}{S_h} & \frac{y_3}{S_h} \\ 1 & 1 & 1 & 1 \end{bmatrix}^{+} $$
The operation represented by the \(+\) symbol is the Moore-Penrose inverse (aka pseudo-inverse).
In our case, due to the structure of our coordinates, we can infer the matrix to be full row rank. Thus, we can compute the pseudo-inverse using the QR method as follow: \( A^+ = A^T \cdot(A \cdot A^T)^{-1} \), \(A^T\) being the transposition, and \(A^{-1}\) being the general inverse.
Once we've got \(A_d\), we need to extract from it the elements \(a_{11}\), \(a_{13}\), \(a_{22}\) and \(a_{23}\). The other elements are approximately \(0\) (except for \(a_{33} = 1\)), and thus don't bear any significance.
[1]: “Static device configuration via udev,” wayland.freedesktop.org. https://wayland.freedesktop.org/libinput/doc/latest/device-configuration-via-udev.html#static-device-configuration-via-udev (accessed Sep. 24, 2023).







